Precision Servo DC Motor 46S/185-8A

ລັກສະນະພື້ນຖານຂອງມໍເຕີ servo DC: (ແບບອື່ນໆ, ປະສິດທິພາບສາມາດປັບແຕ່ງໄດ້)
| 1. ແຮງດັນໄຟຟ້າ: | DC 7.4V | 5. ຄວາມໄວການຈັດອັນດັບ: | ≥ 2600 rpm |
| 2. ຊ່ວງແຮງດັນໄຟຟ້າ: | DC 7.4V-13V | 6. ຕັນປັດຈຸບັນ: | ≤2.5A |
| 3. ການຈັດອັນດັບພະລັງງານ: | 25W | 7. ໂຫຼດປັດຈຸບັນ: | ≥1A |
| 4. ທິດທາງການຫມຸນ: | shaft ຜົນຜະລິດ CW ແມ່ນຢູ່ຂ້າງເທິງ | 8. ການເກັບກູ້ Shaft: | ≤1.0ມມ |
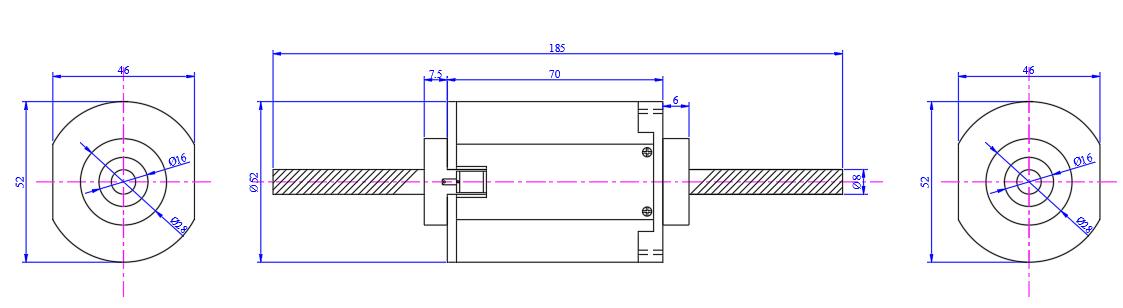
ແຜນວາດລັກສະນະຜະລິດຕະພັນ
ເວລາໝົດອາຍຸ
ນັບຕັ້ງແຕ່ວັນທີຜະລິດ, ໄລຍະເວລາການນໍາໃຊ້ທີ່ປອດໄພຂອງຜະລິດຕະພັນແມ່ນ 10 ປີ, ແລະເວລາເຮັດວຽກຢ່າງຕໍ່ເນື່ອງແມ່ນ ≥ 2000 ຊົ່ວໂມງ.
ຄຸນສົມບັດຂອງຜະລິດຕະພັນ
1.Compact, ການອອກແບບປະຫຍັດພື້ນທີ່;
2.Ball bearing ໂຄງປະກອບການ;
3.ຊີວິດການບໍລິການຍາວຂອງແປງ;
4.External ການເຂົ້າເຖິງແປງຊ່ວຍໃຫ້ການທົດແທນທີ່ງ່າຍເພື່ອຂະຫຍາຍຊີວິດ motor ຕື່ມອີກ;
5.High torque ເລີ່ມ;
6.Dynamic braking ເພື່ອຢຸດໄວຂຶ້ນ;
7.Reversible ພືດຫມູນວຽນ;
8.Simple ການເຊື່ອມຕໍ່ສອງສາຍ;
9.Class F insulation, ອຸນຫະພູມສູງ commutator ການເຊື່ອມໂລຫະ.
10. ປະສິດທິພາບສູງ, ການປະຕິບັດຄ່າໃຊ້ຈ່າຍສູງແລະການແຊກແຊງຕ່ໍາ.
ຄໍາຮ້ອງສະຫມັກ
ມັນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນຂົງເຂດຂອງເຮືອນສະຫມາດ, ອຸປະກອນການແພດທີ່ມີຄວາມແມ່ນຍໍາ, ຂັບລົດໃຫຍ່, ຜະລິດຕະພັນເອເລັກໂຕຣນິກຜູ້ບໍລິໂພກ, ເຄື່ອງນວດແລະການດູແລສຸຂະພາບ, ເຄື່ອງມືການດູແລສ່ວນບຸກຄົນ, ລະບົບສາຍສົ່ງຫຸ່ນຍົນອັດສະລິຍະ, ເຄື່ອງຈັກອຸດສາຫະກໍາ, ອຸປະກອນກົນຈັກອັດຕະໂນມັດ, ຜະລິດຕະພັນດິຈິຕອນ, ແລະອື່ນໆ.
ຮູບພາບການປະຕິບັດ



ລະບົບ Servo: ເປັນລະບົບການຄວບຄຸມອັດຕະໂນມັດທີ່ຊ່ວຍໃຫ້ປະລິມານການຄວບຄຸມຜົນຜະລິດເຊັ່ນ: ຕໍາແຫນ່ງ, ທິດທາງ, ແລະສະຖານະຂອງວັດຖຸທີ່ຈະປະຕິບັດຕາມການປ່ຽນແປງໃດໆໃນເປົ້າຫມາຍການປ້ອນຂໍ້ມູນ (ຫຼືມູນຄ່າທີ່ໃຫ້). ວຽກງານຕົ້ນຕໍຂອງ servo ແມ່ນເພື່ອຂະຫຍາຍ, ຫັນປ່ຽນແລະຄວບຄຸມພະລັງງານຕາມຄວາມຕ້ອງການຂອງຄໍາສັ່ງຄວບຄຸມ, ດັ່ງນັ້ນແຮງບິດ, ຄວາມໄວແລະຕໍາແຫນ່ງຜົນຜະລິດໂດຍອຸປະກອນຂັບສາມາດຄວບຄຸມໄດ້ຫຼາຍ flexible ແລະສະດວກ.
ເນື່ອງຈາກການປະຕິບັດ "servo" ຂອງມັນ, ມັນຖືກເອີ້ນວ່າ servo motor. ຫນ້າທີ່ຂອງມັນແມ່ນການແປງສັນຍານການຄວບຄຸມແຮງດັນ input ເຂົ້າໄປໃນ displacement ເປັນລ່ຽມຜົນຜະລິດແລະຄວາມໄວເປັນລ່ຽມໃນ shaft ເພື່ອຂັບວັດຖຸຄວບຄຸມ.
ຫຼັກການຂອງ DC Servo Motor
ຫຼັກການການເຮັດວຽກຂອງມໍເຕີ DC servo ແມ່ນພື້ນຖານຄືກັນກັບມໍເຕີ DC ທົ່ວໄປ. ແຮງບິດແມ່ເຫຼັກໄຟຟ້າແມ່ນສ້າງຂຶ້ນໂດຍການດໍາເນີນການຂອງ airflow ຂອງ armature ແລະ flux ແມ່ເຫຼັກຊ່ອງຫວ່າງອາກາດເພື່ອເຮັດໃຫ້ servo motor rotate. ໂດຍປົກກະຕິແລ້ວ, ວິທີການຄວບຄຸມ armature ຖືກນໍາໃຊ້ເພື່ອປ່ຽນຄວາມໄວໂດຍການປ່ຽນແຮງດັນໄຟຟ້າໃນຂະນະທີ່ຮັກສາແຮງດັນແຮງດັນໃຫ້ຄົງທີ່. ແຮງດັນໄຟຟ້ານ້ອຍລົງ, ຄວາມໄວຈະຕໍ່າລົງ, ແລະເມື່ອແຮງດັນເປັນສູນ, ມັນຈະຢຸດການຫມຸນ. ເນື່ອງຈາກວ່າໃນເວລາທີ່ແຮງດັນເປັນສູນ, ປະຈຸບັນຍັງເປັນສູນ, ສະນັ້ນ motor ຈະບໍ່ສ້າງ torque ໄຟຟ້າ, ທັງຈະບໍ່ປະກົດປະກົດການຫມຸນດ້ວຍຕົນເອງ.







